维度规约
维度规约,又叫降维,用于提取数据特征,将高维数据转换为低维数据。一方面方便对数据进行可视化和分析;另一方面对数据进行预处理可以加速后续训练,并且减少噪声,使得所训练模型更加简单。如果说密度估计和降维是在数据集样本轴上进行压缩,那么降维就是在数据集特征轴上进行压缩。
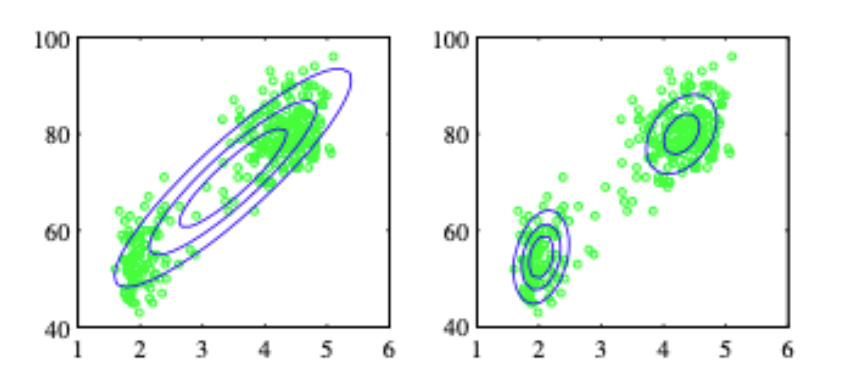
降维和聚类可以同时使用,且应该先降维后聚类,因为当数据维度
DQN 作为 value-based 的强化学习方法,擅长处理离散情境下的强化学习问题。其本质是 deep learning 版本的 Q-learning,所以其基本模型和 Q-learning 类似,基于TD时间差分设置目标函数,并
在此基础上,Nature DQN (NIPS 2015) 通过解耦目标Q值动作的选择和目标Q值的计算,提高了算法效率。此后又在 Nature DQN 的基础上产生了三种独立的优化策略: Deep Reinforcement Learning with Double Q-learning (AAAI 2016) 在计算 TD 值中的目标 Q值时,先从当前网络中获取动作,再从目标网络中计算;Dueling Network Architectures for Deep Reinforcement Learning (ICML 2016) 将 Q 值拆分成状态值 V 和动作的优势值 A;Prioritized Experience Replay (ICLR 2016) 认为 TD 值越大的样本对训练越有利,所以在经验池中,有更大概率选取那些 TD 值更大的样本进行训练;以上三种方法都优化了原始 DQN ,并且这几种方法可以被组合起来使用,后续的一些工作主要就做了融合的尝试,但是因为这种融合怪工作本身没有其他的创新点,所以这里暂且忽略不表。